12月20日,机器人领域权威期刊IEEE Tran. on Robotics在线刊登了我校智能制造装备与技术全国重点实验室在航空大构件机器人测量-加工一体化领域的最新研究成果“A Novel Dual-robot Accurate Calibration Method Using Convex Optimization and Lie Derivative(利用凸优化和李导数的双机器人精确标定方法)”(DOI: 10.1109/TRO.2023.3344025)。我校智能制造装备与技术全国重点实验室为论文第一完成单位,beat365手机版官方网站博士生蒋诚为第一作者、李文龙教授为通讯作者,我校人工智能与自动化学院朱力军教授、香港城市大学李文攀博士、beat365手机版官方网站丁汉院士与赵欢教授为共同作者。这是该团队第三次在权威期刊IEEE Tran. on Robotics发表航空大构件机器人测量-加工一体化的系列化研究成果。
以机器人作为制造装备执行体的机器人化智能制造正逐渐成为大型复杂构件加工的变革性新模式。相比数控机床,机器人化智能制造装备具有运动灵活度高、工作空间大、拓扑结构可变、多机并行协同作业能力强等技术优势,能够适应更加复杂多变的加工环境。随着机器人与多模态感知、人工智能大数据、5G通讯技术等新一代信息技术的深度融合,将突破机器人化智能制造系统的柔顺性、自律性与人机共融能力,大大提升了制造系统的灵巧性和人机交互能力,在航空航天、风电装备、轨道交通等国家战略领域大型复杂构件高性能制造中具有广泛的应用前景,代表着智能制造的主攻方向。
双机器人系统协同作业的前提是精确标定多个单元的空间位姿关系,实现测量机器人、加工机器人、视觉单位、工件工具等坐标归一化,保障机器人测量-加工系统的初始几何精度。目前面临的主要难题是双机器人系统单元间位姿矩阵存在强耦合关系,现有标定方法难以实现所有位姿关系的同步精确标定。该团队在双机器人标定数学模型 基础上,利用SE(3)群上的指数映射构建了双机器人系统的空间传递链,并通过对应的李导数建立了双机器人系统标定的凸优化模型,该模型可通过G-N或L-M方法对双机器人系统所有位姿关系进行同步优化求解,攻克了强耦合关系导致的姿态标定不精确难题,具有对初值不敏感、求解稳定、计算精度高等优势。实验结果表明,所提双机器人标定精度相比最新提出的方法(香港中文大学2016年提出和本团队2021年提出)分别提升了52.41%和18.31%。
基础上,利用SE(3)群上的指数映射构建了双机器人系统的空间传递链,并通过对应的李导数建立了双机器人系统标定的凸优化模型,该模型可通过G-N或L-M方法对双机器人系统所有位姿关系进行同步优化求解,攻克了强耦合关系导致的姿态标定不精确难题,具有对初值不敏感、求解稳定、计算精度高等优势。实验结果表明,所提双机器人标定精度相比最新提出的方法(香港中文大学2016年提出和本团队2021年提出)分别提升了52.41%和18.31%。
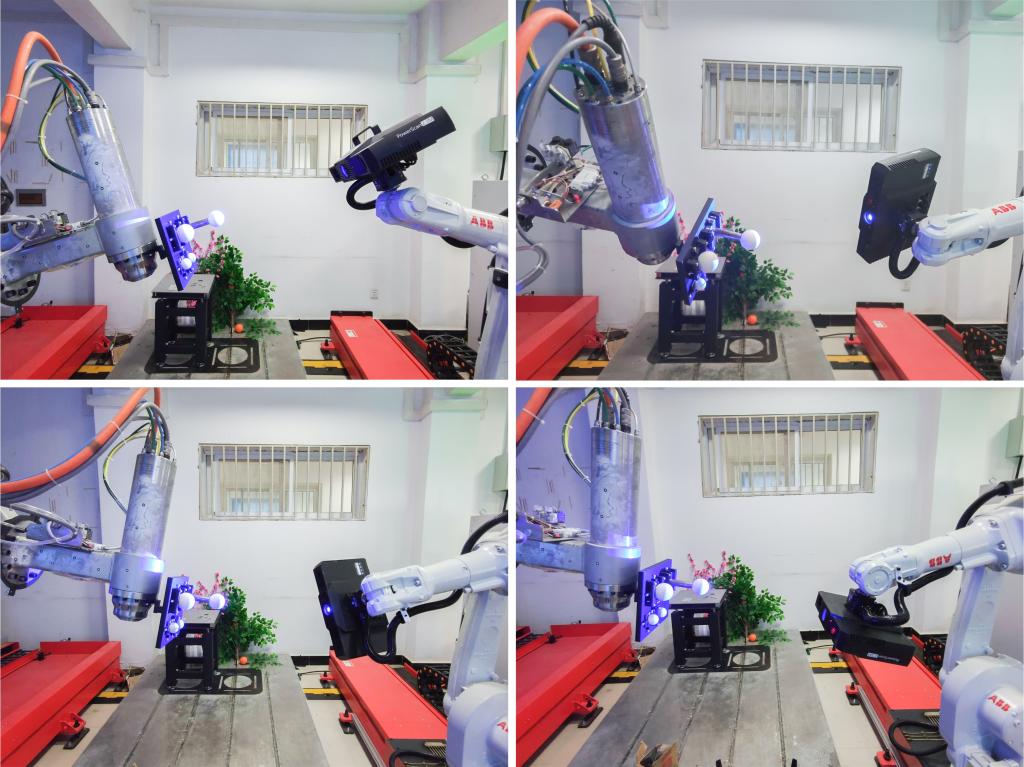
双机器人精确标定现场实验

航空大构件机器人测量-加工一体化智能制造平台
该项工作得到国基金基础科学中心项目“机器人化智能制造”(No. 52188102)、国基金重大项目“大型构件机器人小余量去除机理与高精度装配”(No. 52090054)、国基金面上项目“飞机蒙皮零件机器人在位测量与数据处理”(No. 52075203)与校基础研究计划(No. 2023BR009)联合资助,以及国家数字化设计与制造创新中心的大力支持。该项成果为华中科技大学建立具有国际先进水平的航空大构件机器人“测量-操作-加工”(3M)一体化大闭环平台提供了重要理论基础和技术支撑。
论文链接:https://ieeexplore.ieee.org/document/10363661


 学院微信公众号
学院微信公众号